|
Welcome to my homepage! 😊 My name is YANG Lei (pronounced "Young Lay," with slightly different tones). I am a lecturer (teaching track) at Tam Wing Fan Innovation Wing (InnoWing), Faculty of Engineering, The University of Hong Kong. I design and develop extracurricular, experiential learning activities for undergraduates to gain real-world engineering experiences. I also supervise a number of undergraduate student projects in the areas of robotics, computer vision, computer graphics, and deep learning. It is much fun to work with brilliant young minds and inspiring teachers. My research interests include geometric modeling, robotics, and engineering education. I love playing football and I play for HKU staff team. ⚽ Email / Google Scholar / Github / LinkedIn |
 |
|
Lecturer, Tam Wing Fan Innovation Wing, The University of Hong Kong, 2023-present |
|
Ph.D., Automotive Engineering, Dalian University of Technology, 2018 |

|
A portable robotic weed control system, named InnoBox, is proposed to enhance the efficiency of agricultural production. A special thanks to Dr. Michel Dongmo who provided insights and knowledge about farming and weed control to the student team. Robotics |
|
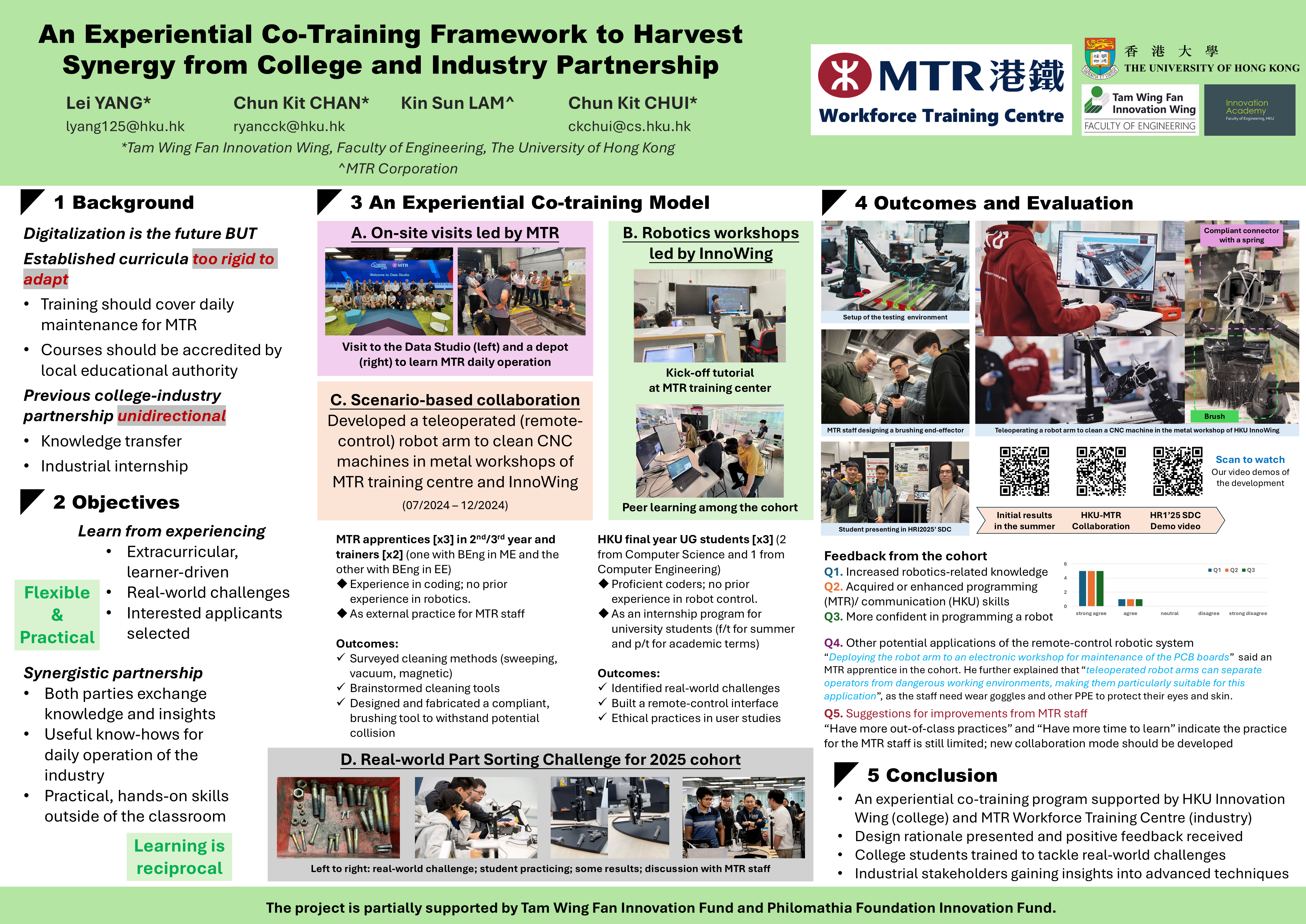
This project is stemmed from our collaboration with MTR to promote robotic technologies in the maintanence operation. This project aims to achieve SDGs 4 and 9. Robotics |
* denotes equal contribution. Please see my google scholar page for full list of publications.
|
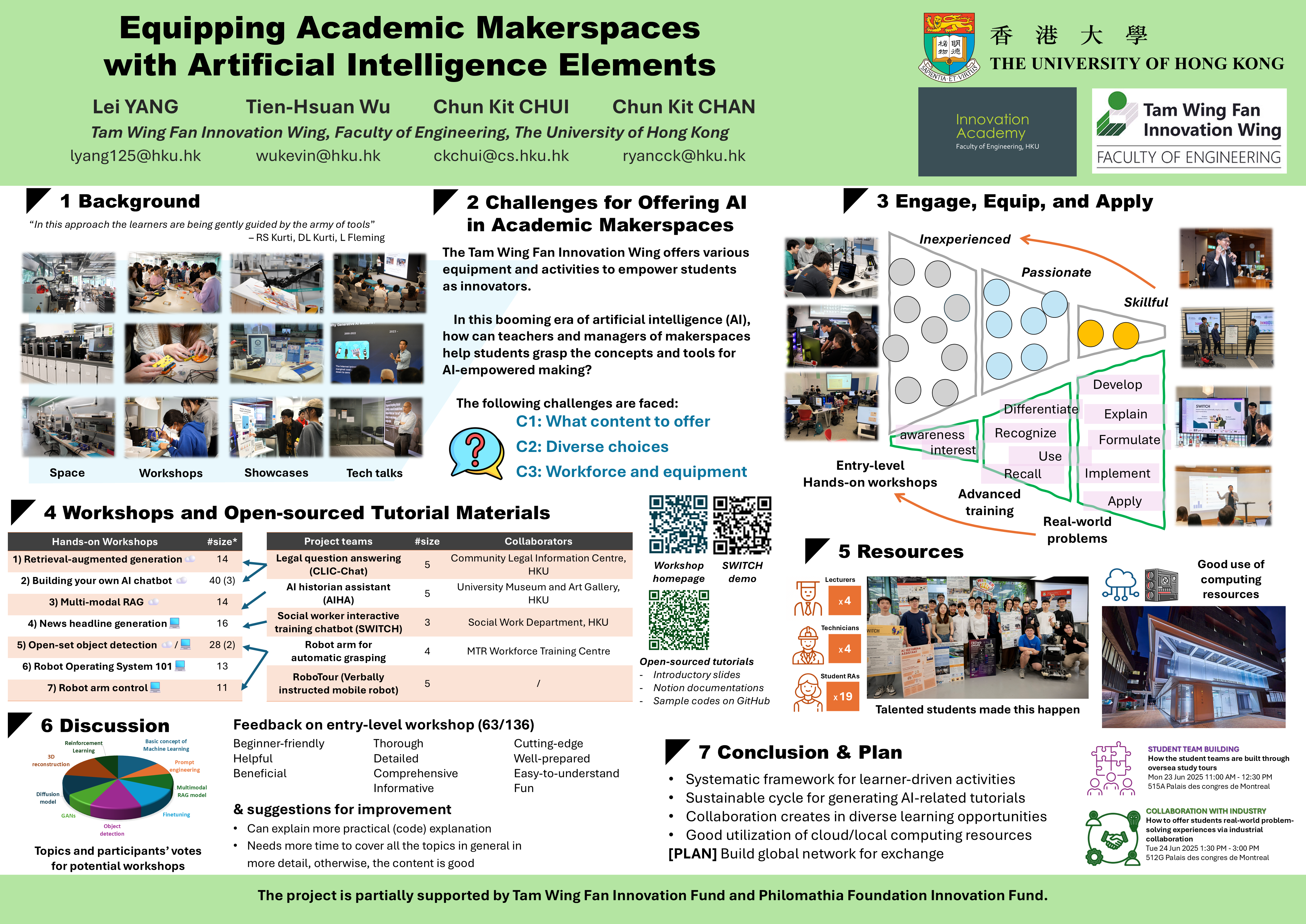
Lei Yang, Tien-Hsuan Wu, Chun Kit Chui, Chun Kit Chan 2025 ASEE Annual Conference & Exposition, Montreal, Canada, 2025 We report a sustainable and scalable framework implemented in InnoWing during the past two years for incorporating AI into our academic makerspace. To make this framework reproducible in other academic makerspaces, we made our teaching materials open-sourced. We aim to build an open community for building the next-generation academic makerspaces with AI. Engineering education |
|
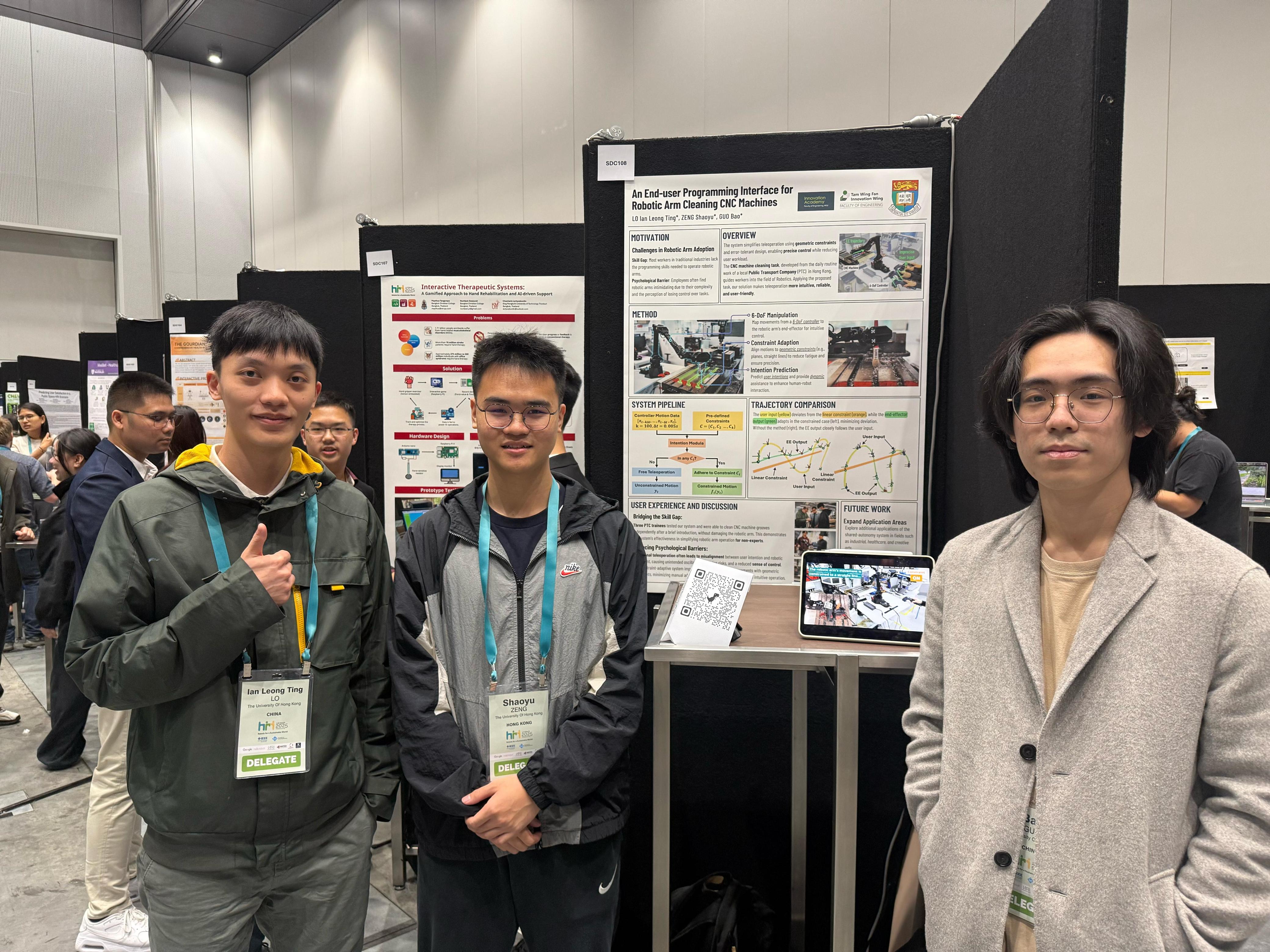
Lei Yang, Chun Kit Chan, Kin Sun Lam, Chun Kit Chui 2025 ASEE Annual Conference & Exposition, Montreal, Canada, 2025 Showcasing an industrial collaboration project between InnoWing and MTR Operational Training Centre on hands-on learning of robotic arms for both undergraduate students and industrial professionals. Engineering education |

|
We introduce a progressive framework consisting of three stages: adoption, development, and application of AI competencies. This framework, implemented at InnoWing, aims to enhance AI literacy and promote responsible AI use. Engineering education |

|
CLIO is a tour guide robot with co-speech actions to direct visitors' visual attention and thus enhance the overall user engagement in a guided tour. Human-robot interaction |
|
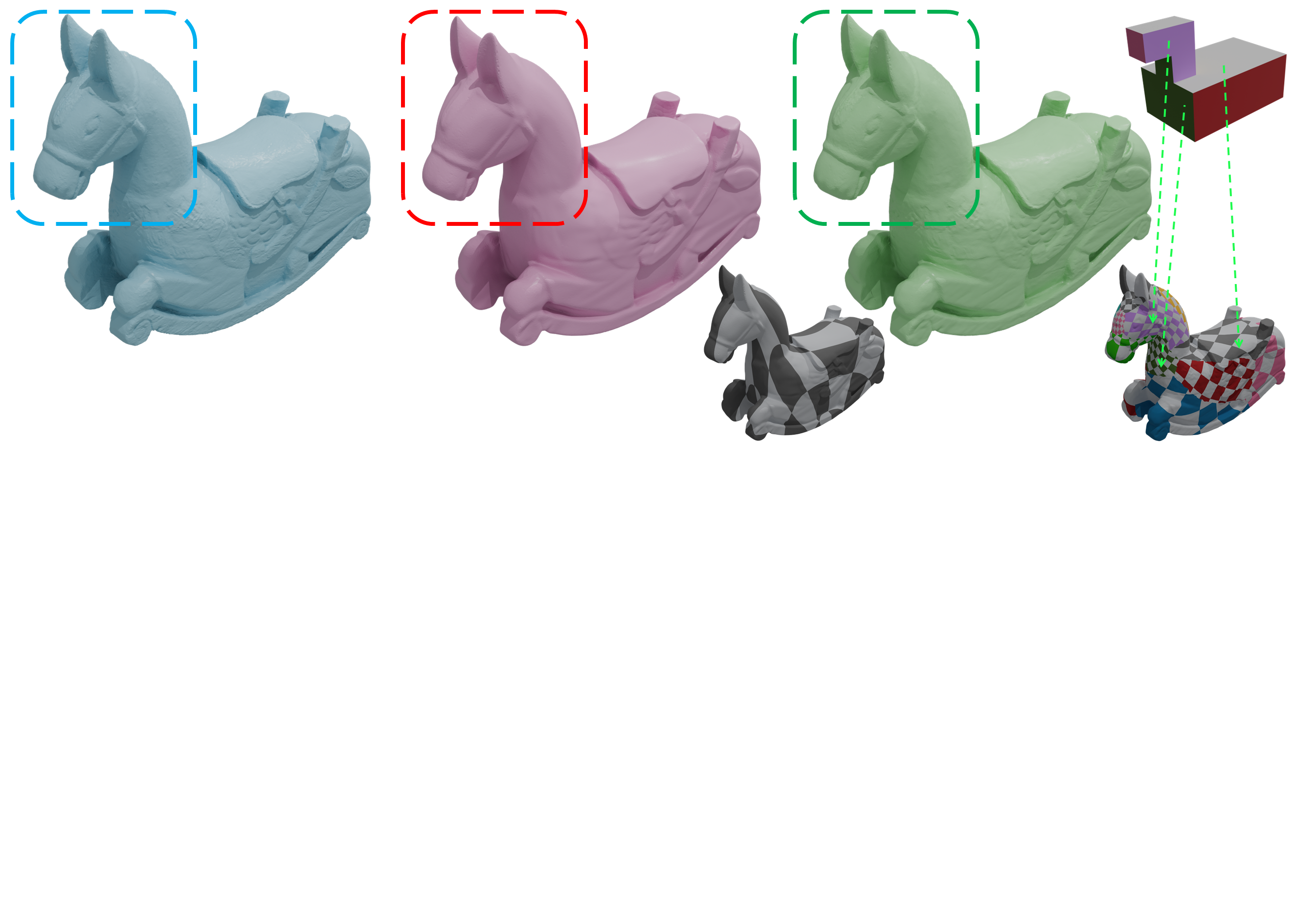
Surface shapes carry design-specific semantics that entail patch layouts consisting of n-gons. We present the first neural piecewise parametric surface with high flexibility to model surface shapes with multiple n-gons. Geometric modeling |
|
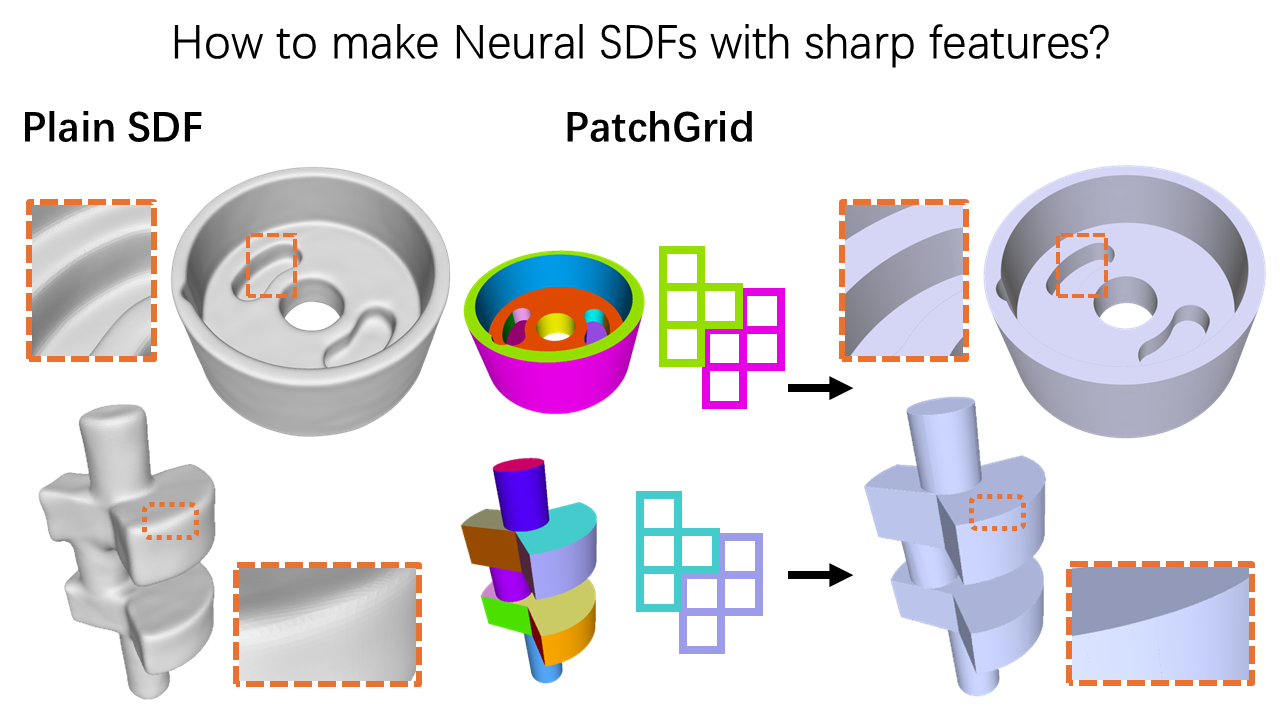
A compositional neural implicit representation for modeling sharp geometric features and open surfaces in a few seconds. Geometric modeling |
|
Humans are good at using fingers to push, drag, or fling fabric pieces around. We present a method to plan a series of non-prehensile actions to align a fabric piece to specified goal pose. Robotics |
|
Humans are good at using fingers to push, drag, or fling fabric pieces around. This paper presents an approach to flinging a fabric object to a target position in a single attempt by modeling the fabric dynamics with environments. Robotics |
|
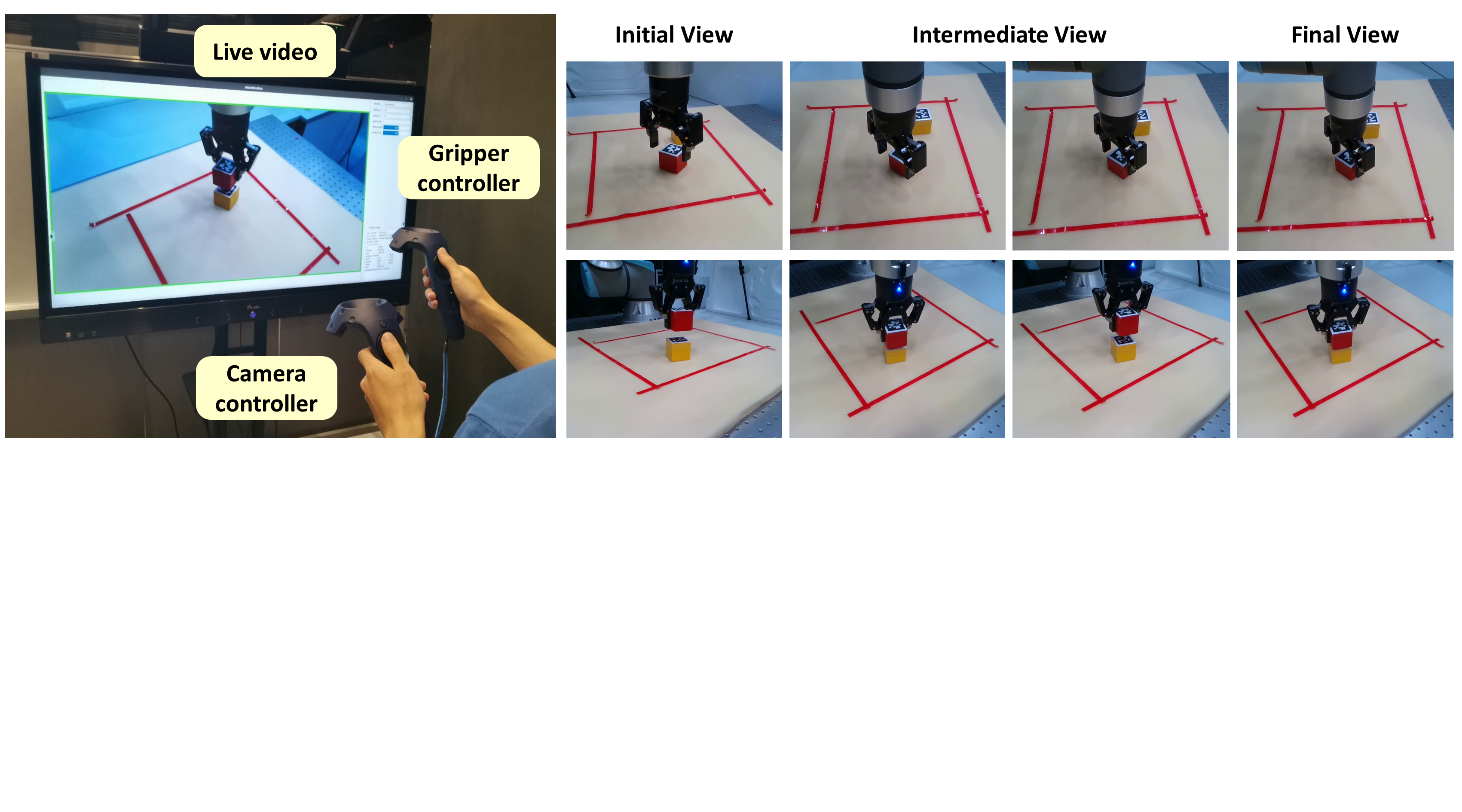
It is mentally and physically demanding for an operator to controll both the robotic manipulator and the remote camera in a teleoperation setting. We present an autonomous viewpoint adjustment system to allow human operators to focus on controlling only the remote manipulator. Human-robot interaction |
|
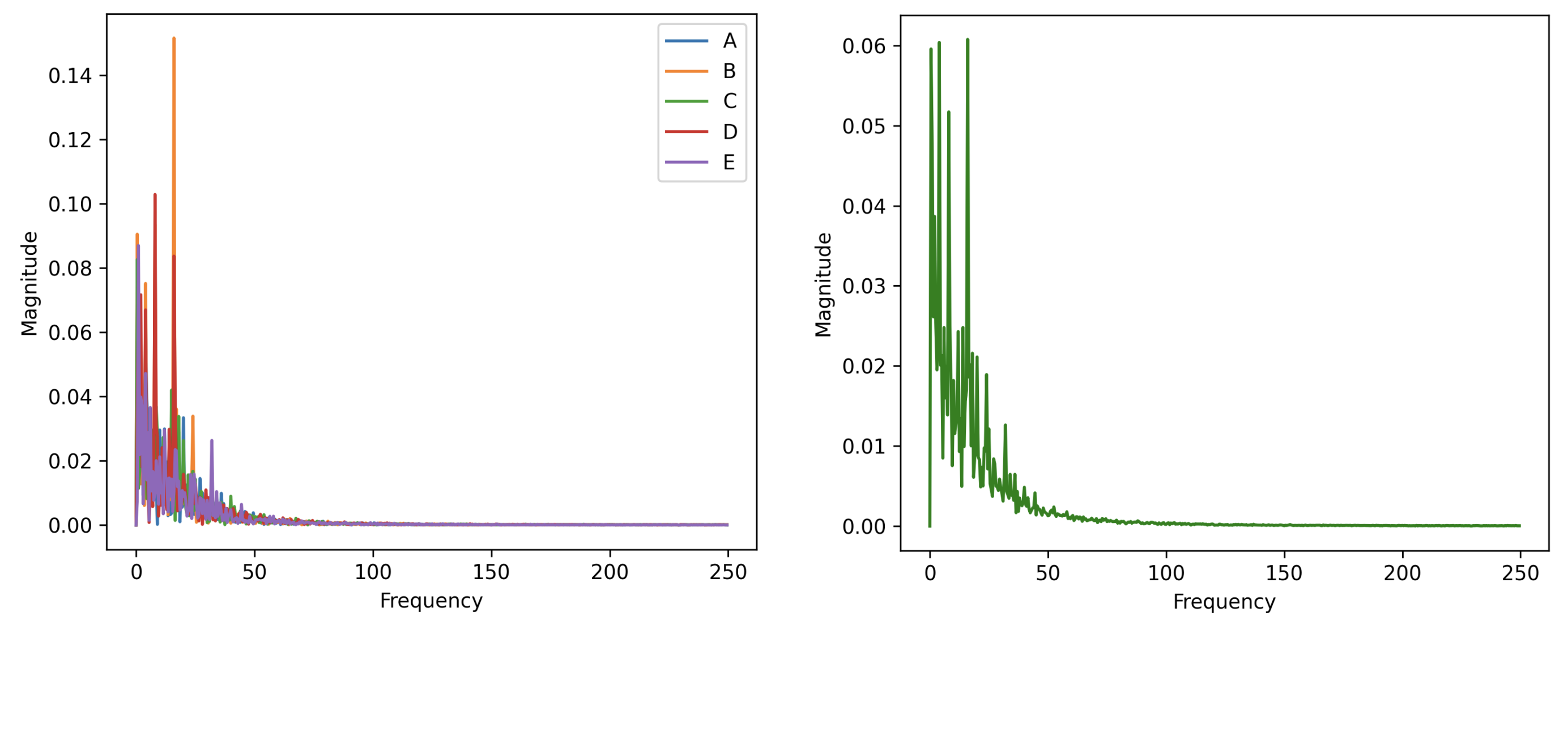
The intrinisc frequecy of MLP neural networks of the same architecture is demonstrated. Interplay of the intrinsic frequency and artifacts in learned SDF with sinusoidal positional encoding can be empirically explained by the Nyquist-Shannon sampling theorem. Geometric modeling |
|
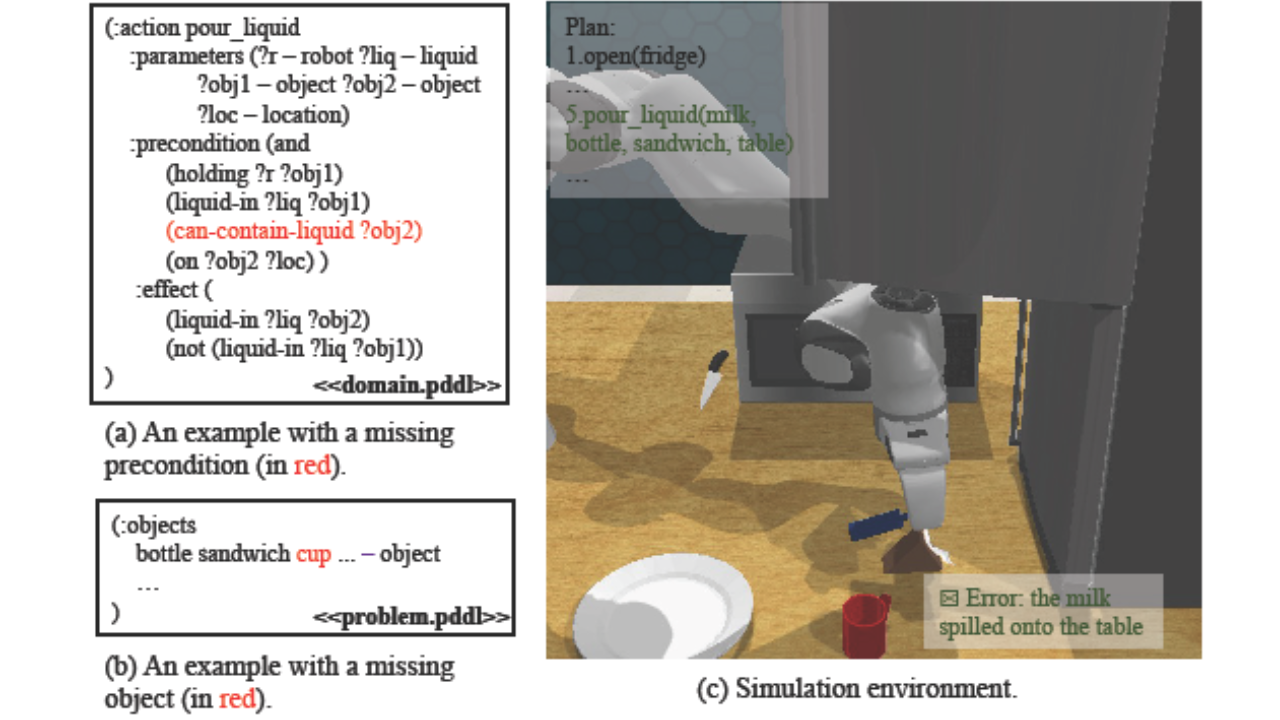
A symbolic planner augmented with an LLM to supplement commonsense for long-horizon task planning and action recorrection. Robotics |

|
An interactive UI for modeling 3D characters and texturing them from a single color drawing. Geometric modeling |
|
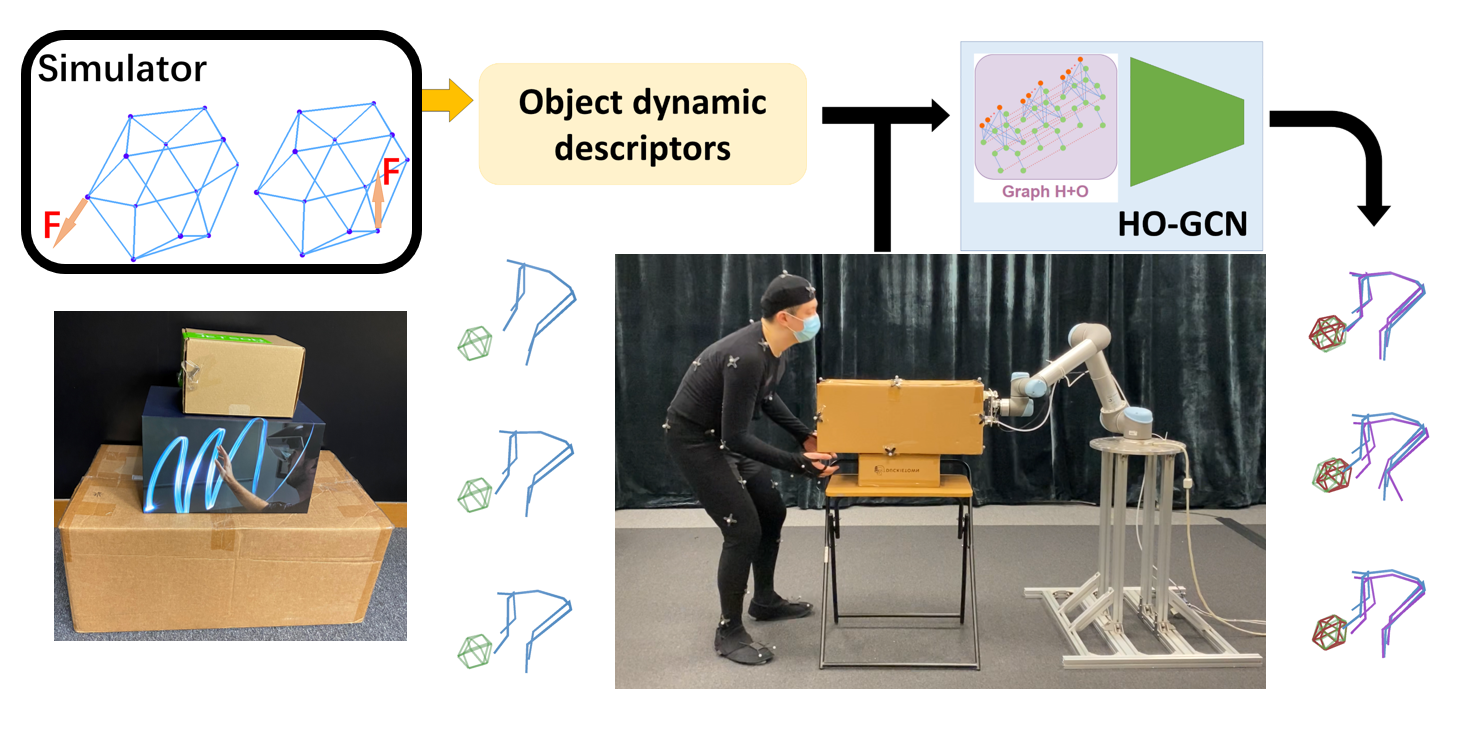
A deep learning method and a dataset for human whole-body manipulation of large-sized objects Human-robot interaction |

|
Estimating 6D poses of CAD objects with no texture and high symmetry from RGB images is an important but challenging task. A geometric prior is enforced such that the encoded representations of two images are closer in the latent space if their corresponding poses are closer in SE(3). Deep learning for geometry |
|
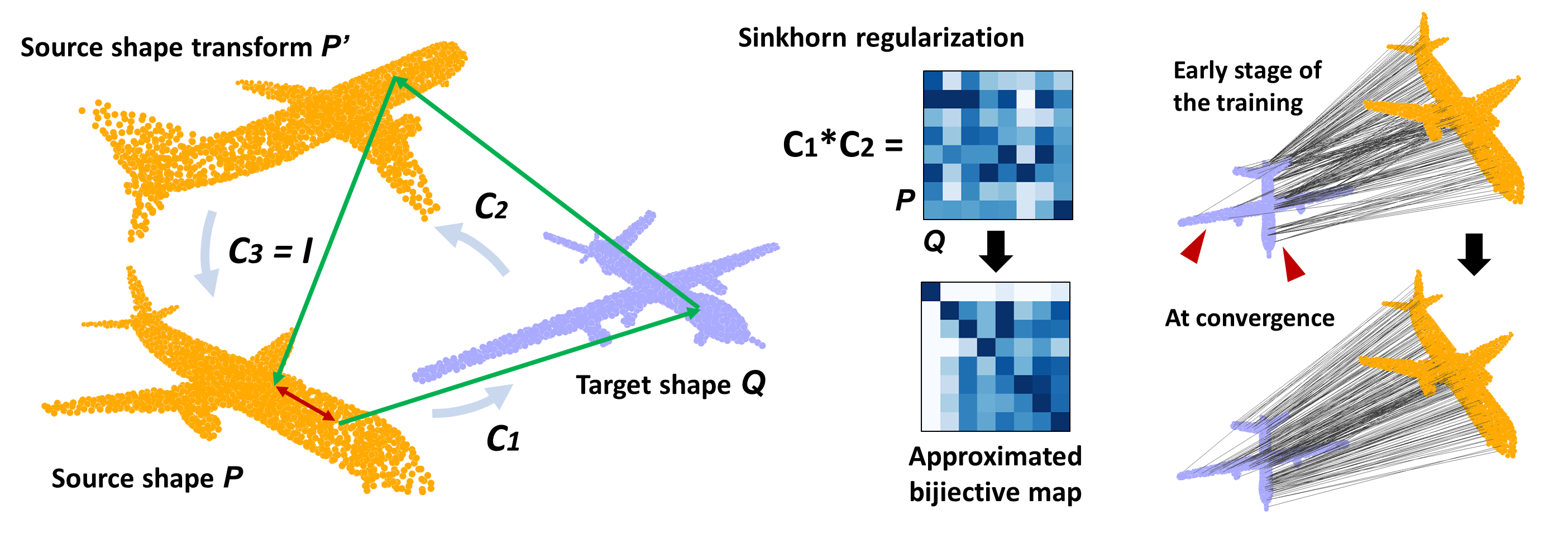
Unsupervised learning of point-wise feature descriptors for objects with dense correspondence as the pretext. Sinkhorn regularization is used to enforce the bijective map between the same object under different poses during the training. Deep learning for geometry |
|
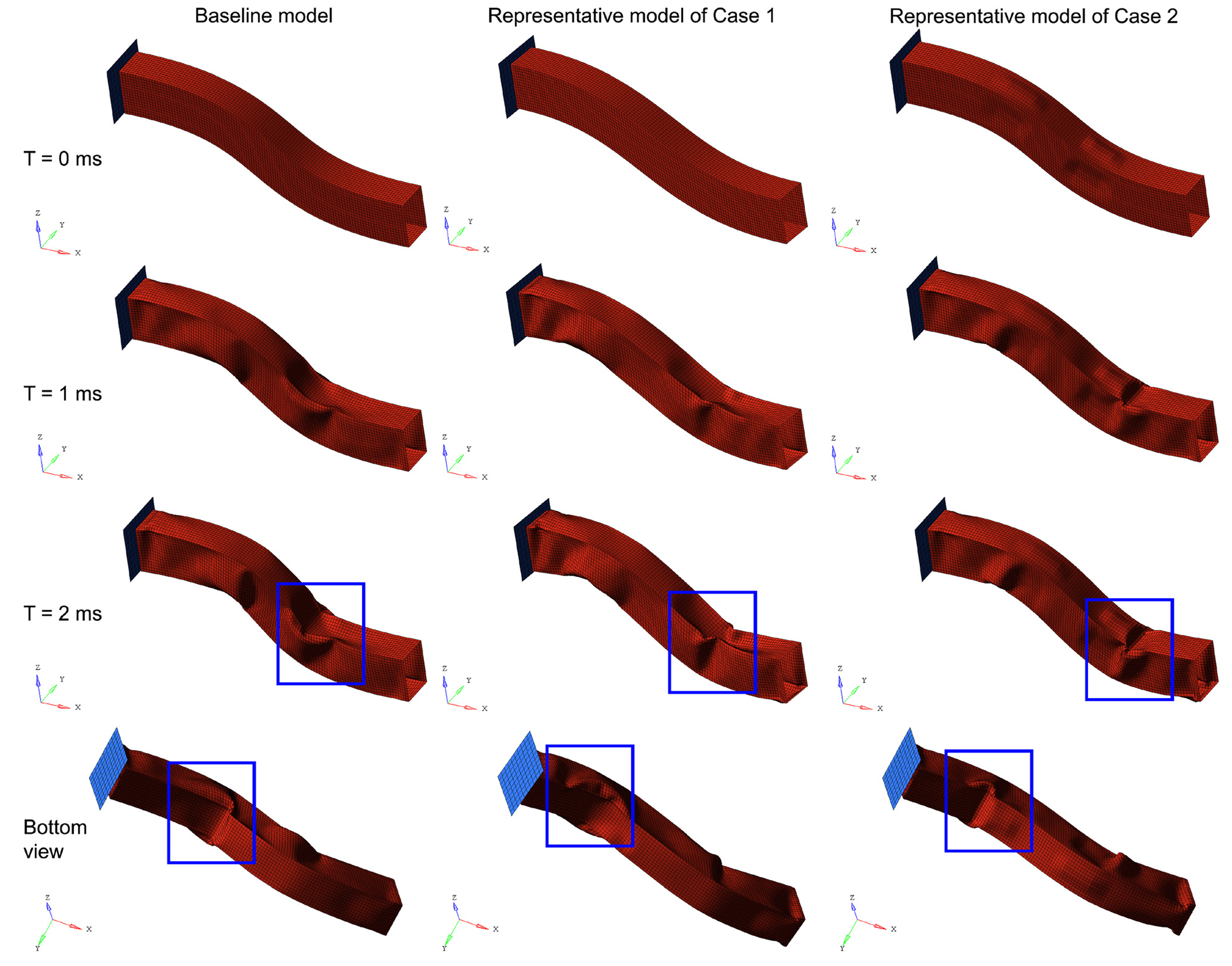
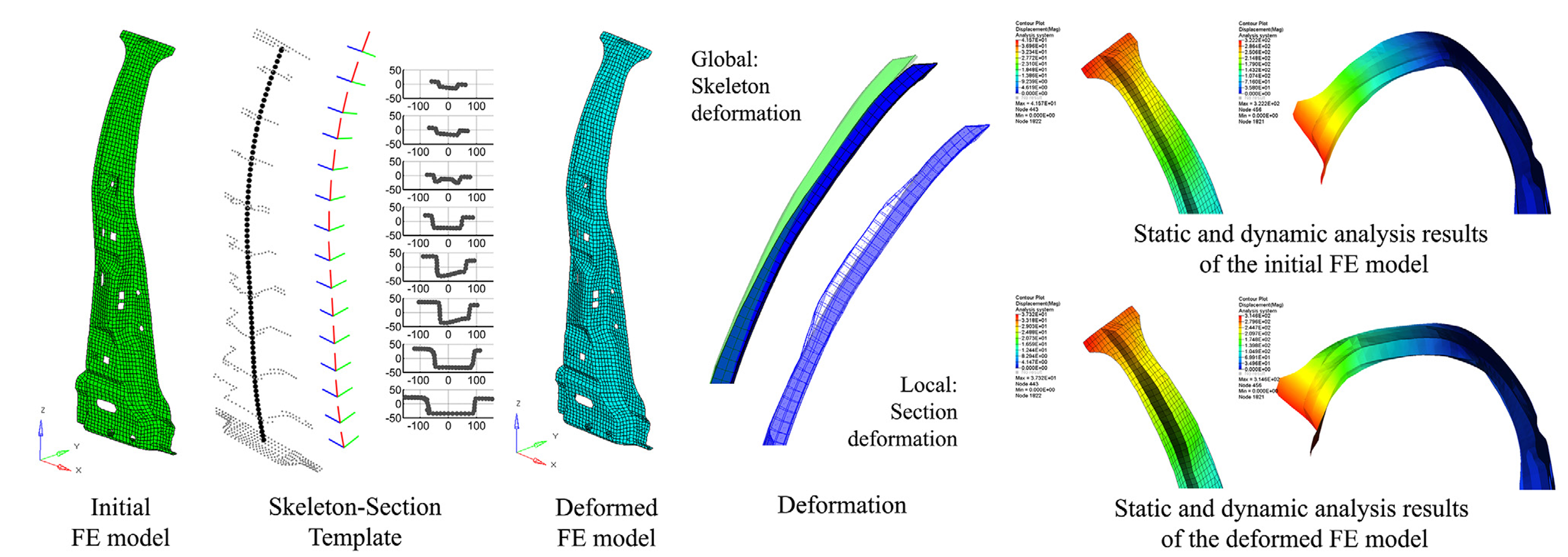
A parameterization method based on the Skeleton-Section template for optimizing thin-walled structures under crash loading. Computer-aided design |
|
A radial basis function-based deformation method for finite element mesh of thin-walled structures using the curve skeleton and cross-sectional profiles as hierarchical deformation handles. Computer-aided design |
Last update: 2025.07. Thanks. |